


















초고속 추진력 갖춘 문어형 수중로봇 개발
페이지 정보
작성자 실장 작성일15-02-13 12:30 조회11,843회 댓글0건본문
 |
|
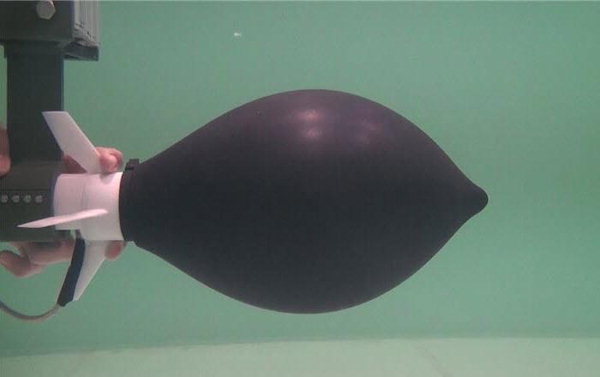
| 영국의 사우샘프턴대 등 연합 연구팀이 개발한 초고속의 중력과 가속도로 물 속을 통과하는 문어 형태의 로봇. KISTI 제공 |
- 경직형 로켓의 2.6배 추진력 획득
초고속 추진력과 가속도로 물 속을 통과하는 문어 형태의 로봇이 개발됐다.
한국과학기술정보연구원 KISTI 미리안 '글로벌동향브리핑'은 영국의 사우샘프턴대(University of Southampton), 미국의 매사추세츠 공대(MIT), 연구 및 기술을 위한 싱가포르-매사추세츠 공대 연합(SMART: Singapore-MIT Alliance for Research and Technology) 등에 소속된 과학자들이 문어나 오징어에서 영감을 받아 이 같은 로봇을 제작했다고 12일 밝혔다.
대부분의 빠른 수생 동물은 물속에서 쉽게 이동하기 위해 매끈하고 가느다란 모양을 띄고있다. 그러나 문어나 오징어와 같은 두족류(cephalopod)는 자신의 몸에 물을 채우고 이를 신속하게 방출하는 방법으로 빠르게 달아난다. 연구팀은 이러한 두족류에 영감을 받아 3차원 인쇄기로 만든 골격을 가진 문어 형태의 로봇을 제작했다. 이 로봇은 탄성을 가진 얇은 외피 외에는 움직이는 부품이나 에너지 저장 장치가 없다는 것이 특징이다.
길이가 30㎝인 이 자체 추진 로봇은 유선형이 아님에도 물을 채워서 몸을 부풀린 후 맨 아래 부분에서부터 물을 발사해 신속하게 오므라드는 방식으로 놀라운 추진력과 가속도를 얻는다. 이 로봇은 경직된 로켓과 비교해 2.6배 이상의 추진력을 얻을 수 있다.
이 로봇은 풍선을 부풀어 오르게 한 후에 날리는 것과 비슷한 방식으로 동작한다. 다른 점은 로봇 내부에 있는, 3차원 인쇄기로 만들어진 폴리카보네이트(polycarbonate) 골격은 풍선을 단단하게 유지시켜 최종 형상이 유선형이 되도록 한다. 뒤쪽에 있는 지느러미는 로봇이 똑바로 가도록 돕는다.사우샘프턴대의 사우샘프턴 해양 연구소(Southampton Marine and Maritime Institute) 소속 전임강사인 가브리엘 웨이머스(Gabriel Weymouth) 박사는 "경직된 형체의 로봇은 주위의 물에 에너지를 잃는다.
그러나 급속하게 수축하는 형태의 이 같은 로봇은 53%의 에너지 효율을 가진다. 이러한 에너지 효율은 빠르게 출발하는 실제 물고기의 능력보다 낫다"라고 설명했다.
연구자들은 이 로봇을 더 크게 만들면 빠르게 출발할 수 있는 성능이 더 향상될 수 있을 것으로 기대한다. 그리고 이러한 형태의 로봇 구조는 인공적인 수중 이동체를 개발하는 분야에 적용될 수 있다. 또 비행기의 날개 설계처럼 항력(drag)이 중요한 공학 분야에서부터 형상이 변하는 생물 시스템에 대한 연구에까지 영향을 미칠 것으로 기대된다.
댓글목록
등록된 댓글이 없습니다.




