


















NASA의 고슴도치로봇...혜성 탐사도 안심
페이지 정보
작성자 실장 작성일15-09-07 14:30 조회12,422회 댓글0건본문
‘바퀴달린 기존 탐사로봇과 달리 스파이크 박힌 정사각형으로 설계돼 어느 면으로 착륙하더라도 즉시 작동할 수 있다. 점프하거나 구르거나 회전하면서 이동한다. 내부 속도조절바퀴(플라이휠)을 사용해 어느 곳에서도 멈출 수 있다.심지어 모래구덩이에 빠져도 스스로 회전하면서 튀어나오는 ’토네이도‘(Tornado)기능까지 과시한다.’
미항공우주국(NASA,나사)가 지난 4일 우주의 어느 천체에 착륙하더라도 안전하게 임무를 수행할 수 있도록 만든 고슴도치 로봇을 선보였다.
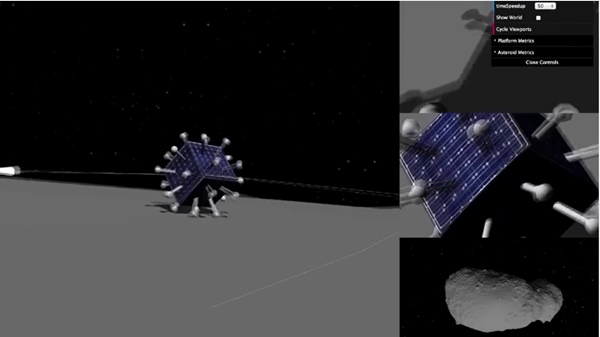
고슴도치로봇의 기본 컨셉은 3개의 내부 플라이휠에 의해 움직이고 회전하는 스파이크 장착형 정사각형 로봇이다.
■제자리에서 튀어 오르고, 굴러다니며 지표 온도 측정
이 로봇은 제자리에서 뛰어 오르고,구르는 기능을 가지고 있다. 화성에서 사용되고 있는 바퀴달린 탐사로봇과 다르다. 고슴도치로봇의 몸에 박힌 스파이크는 낯선 행성이나 혜성같은 천체의 토양으로부터 로봇 몸체를 보호해 주며 제자리에서 뛰거나 구를 때(텀블링) 발처럼 작동한다. 스파이크 박힌 열감지 계측기(프로브)는 굴러다니면서 지표면 온도를 측정한다.



나사는 이 로봇이 행성과 소행성을 탐사하는 이상적인 도구가 될 것이라고 말하고 있다. 이 디자인의 로봇은 점프하고, 뒤집어지고 구르면서 이동하도록 설계돼 있다. 따라서 바퀴를 사용하는 기존 탐사로봇과 달리 장애물에 걸리거나 빠지거나 뒤집혀도 작동할 수 있다.
나사의 고슴도치로봇 설계 아이디어는 지난해 말 추류모프-게라시멘코/67P혜성에 착륙한 필레이로봇이 혜성 착륙시 제자리를 찾지 못하고 튕겨져 나가 위치를 찾지 못하고 있는 상황에서 본격적으로 시작됐다.
지난 해 67P혜성에 착륙해 탐사작업을 하던 필레이는 바위들 사이에 갇혀 나오지 못하고 있는 것으로 추정되고 있다.
낮은 중력과 거친 표면을 가진 소행성이나 혜성같은 작은 천체의 탐사를 전통적인 방식의 바퀴달린 로봇에게 맡기기는 위험하다.
고슴도치로봇 프로젝트에는 나사 제트추진연구소(JPL),스탠포드대,매사추세츠공대(MIT)가 공동 참여했다.
JPL팀의 이사 네스나스는 “이 고슴도치 로봇은 정사각형으로 돼 있어 착륙시 어느 면으로 지면에 닿더라도 작동할 수 있다”고 말했다.
■혜성, 소행성처럼 낮은 중력의 거친 표면에서도 유연하게 탐사
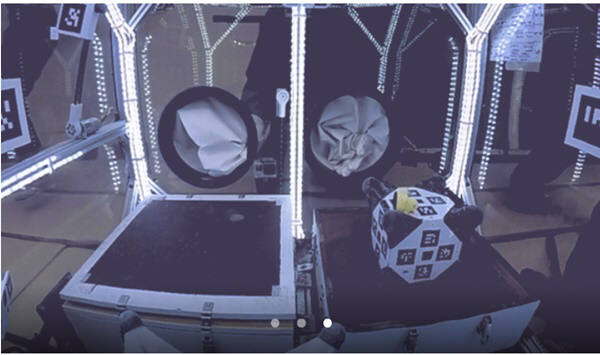
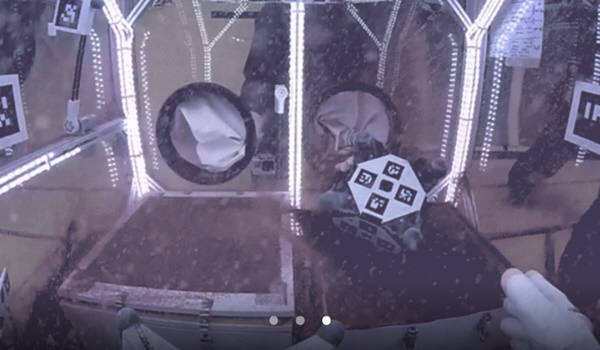
이 고슴도치로봇은 4번의 비행동안에 180회나 포물선을 그리면서 착지해 다양한 형태의 임무수행 능력을 과시했다. 이를 통해 낮은 중력을 가진 작은 천체에서 얼마나 유용하게 작동할 수 있을지를 보여주었다.
연구진은 이같은 고슴도치 임무수행 능력을 모래,러프,바위,미끄럽고 얼음이 언 곳, 부드럽고 부서지기 쉬운 곳 등 다양한 지형에서도 시험했다.
로버트 리드 JPL프로젝트 수석연구원은 “우리는 고슴도치로봇 시제품을 통해 처음으로
혜성같은 환경에서 제자리에서 뛰어오르기,구르기 같은 제어된 동작수행을 시연했다“고 말했다.
고슴도치로봇의 가장 간단한 동작은 한 장소 방향을 돌리는 이른바 ‘유(yaw)’동작이다.
고슴도치로봇은 스스로 올바른 방행을 잡은 후에는 1~2개의 스파이크를 사용해 제자리에서 긴 거리를 뛰어오르거나 한면에서 다른면으로 면을 회전시켜 짧은 거리를 굴러가게 된다.
또한 관심대상 목표물로 크게 껑충뛰어 다가간 후 작은 동작으로 굴러서 더욱가까이 다가가게 된다.
연구진은 포물선 비행시험을 통해 고슴도치로봇이 이른 바 ‘토네이도’ 임무수행 기능을 확인했다. 이는 로봇은 지표면에서 나오기 위해 자신을 아주 적극적으로 회전(발진)시키는 것이다. 고슴도치로봇은 이러한 기능을 사용해 기존의 바퀴달린 로봇이 빠져 나오지 못하는 모래로 된 싱크홀 등에서도 빠져 나올 수 있다.

JPL의 고슴도치로봇은 8개의 스파이크와 3개의 플라이휠을 가지고 있다. 연구진은 무게 5kg인 이 시제품에 카메라와 분광계측기까지 장착하면 9kg로 늘어날 것으로 보고 있다. 스탠포드대가 만든 시제품은 약간 더 작고 가벼우며, 스파이크도 더 짧다.
고슴도치탐사 로봇의 브레이크 기계구조는 JPL버전과 스탠포드대 버전이 다르다. JPL은 디스크브레이크를 사용하지만 스탠포드대는 플라이힐을 급작스레 정지시키기 위해 마찰저항벨트를 적용했다.
스탠포드대 연구진을 이끌고 있는 마르코 파본은 “플라이휠을 어떻게 제어해 멈추느냐에 따라 고슴도치 로봇의 뛰어오르는 각도를 다르게 조절할 수 있다”고 말했다. 그는 지난 2011년 네스나스와 함께 2개의 브레이크시스템을 제안했다.
그는 “고슴도치로봇 스파이크의 기하학적 형태는 튀어 오르는 궤도에 커다란 영향을 미친다. 우리는 여러개의 스파이크를 단 시제품으로 여러 번의 시험을 거쳤다. 그 결과 정사각형태일 때 가장 잘 튀어 오를 수 있다는 것을 알아냈다”고 말했다.
벤자민 호크먼 스탠프로대 프로젝트 담장자는 이 정사각형 로봇은 우주선 안에서 생산,조립하기도 훨씬 쉬워졌다고 말했다.
■NASA,자율기능 부여작업 추가중
연구진은 현재 고슴도치가 지구에서의 지시를 받지 않고 작동할 수 있는 능력을 높이기 위해 자율주행 기능 부여작업을 하고 있다.
이는 화성의 궤도를 도는 위성(MRO)이 화성탐사로봇 큐리오시티와 오퍼튜니티와 교신해 화성탐사 결과 데이터를 지구로 전달시켜 주는 방식과 같다.
궤도를 도는 모선은 또한 로봇이 자신의 위치를 확인하고 탐사하는 것을 돕게 해준다.
고슴도치 로봇은 단순한 구조로 돼 있어 전통적인 탐사로봇에 비해 상대적으로 낮은 비용으로 만들 수 있다. 우주선비행중에도 조립해 짜 맞출 수 있을 정도로 간단하다.
댓글목록
등록된 댓글이 없습니다.




